
 English
English
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Jajan
Jajan
 Mexic
Mexic
 Turkey
Turkey
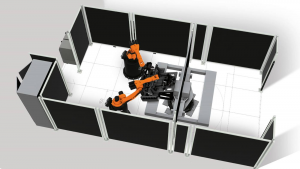 KUKA Robotics llevará sus tecnologías líderes de simulación educativa y de software a la conferencia CareerTech VISION 2022 de la Association for Career & Technical Education (ACTE) en Las Vegas. pudierón experimentar la celda de formación móvil ready2_educate de KUKA, que ofrece una puerta de entrada al mundo de la robótica.
KUKA Robotics llevará sus tecnologías líderes de simulación educativa y de software a la conferencia CareerTech VISION 2022 de la Association for Career & Technical Education (ACTE) en Las Vegas. pudierón experimentar la celda de formación móvil ready2_educate de KUKA, que ofrece una puerta de entrada al mundo de la robótica.
ready2_edcucate es una celda de formación modular que utiliza el pequeño robot KR AGILUS y el microcontrolador KR C5. La célula, de fácil manejo, está preconfigurada y lista para funcionar en el momento de la entrega. Los paquetes de aplicaciones disponibles incluyen la formación básica del robot, la puesta en marcha y la programación en modos externos.
Sin necesidad de tener mucha experiencia en programación, KUKA.Sim proporciona una optimización rápida y sencilla del funcionamiento del robot fuera de línea, permitiendo la simulación de todo un sistema robotizado en tan sólo unos minutos. Al crear un gemelo digital y una réplica exacta del proceso de producción, KUKA.Sim permite la puesta en marcha y verificación virtuales para construir, probar y mejorar las líneas de producción de antemano. KUKA.Sim es la mejor opción para una productividad óptima en la programación offline gracias a su interfaz de fácil manejo y a la selección de funciones y módulos.
Las ventajas de la simulación de procesos de producción con KUKA.Sim se basan en:
Eficiencia del tiempo: Sin tener que crearlos realmente, puede planificar sus conceptos de sistemas y robots de forma rápida, cómoda e independiente.
Mayores ventas: Su equipo de ventas tendrá más éxito a la hora de cerrar acuerdos si utiliza KUKA.Sim para presentar sus soluciones a los clientes de forma profesional.
Precisión de planificación: Para una mayor fiabilidad y competitividad de la planificación, cree conceptos de sistema por adelantado con tiempos de ciclo extremadamente precisos.
Comprobación: Puede evaluar la viabilidad de los programas de robot y los diseños de célula utilizando las funciones de comprobación de accesibilidad y detección de colisiones.